Abstract
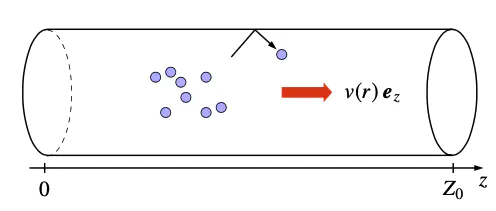
The analysis and design of advection-diffusion based molecular communication (MC) systems in cylindrical environments is of particular interest for applications such as micro-fluidics and targeted drug delivery in blood vessels. Therefore, the accurate modeling of the corresponding MC channel is of high importance. The propagation of particles in these systems is caused by a combination of diffusion and flow with a parabolic velocity profile, i.e., laminar flow. The propagation characteristics of the particles can be categorized into three different regimes: The flow dominant regime where the influence of diffusion on the particle transport is negligible, the dispersive regime where diffusion has a much stronger impact than flow, and the mixed regime where both effects are important. For the limiting regimes, i.e., the flow dominant and dispersive regimes, there are well-known solutions and approximations for particle transport. In contrast, there is no general analytical solution for the mixed regime, and instead, approximations, numerical techniques, and particle based simulations have been employed. In this paper, we develop a general model for the advection-diffusion problem in cylindrical environments which provides an analytical solution applicable in all regimes. The modeling procedure is based on a transfer function approach and the main focus lies on the incorporation of laminar flow into the analytical model. The properties of the proposed model are analyzed by numerical evaluation for different scenarios including the uniform and point release of particles. We provide a comparison with particle based simulations and the well-known solutions for the limiting regimes to demonstrate the validity of the proposed analytical model.
Contents:
- Preliminaries
- Videos of the propagation of the particles in the cylinder for a uniform release supplementary to Fig. 4 (see [1, Sec. V-D])
- Videos of the propagation of the particles in the cylinder for a point release supplementary to Fig. 5 (see [1, Sec. V-E])
- Videos of the propagation of the particles in the cylinder for analysis of accuracy (see [1, Sec. VI-B])
- Remarks regarding the implementation (see [1, Sec. VI-A])
- Performance analysis
- References
1. Preliminaries
We note that the variables in the presented formulas are defined in [1].
1.1 Summary of the proposed model
The considered advection-diffusion problem with laminar flow is mathematically described by the PDE [1, Eq. (4)]
The solution of the PDE is derived by a transfer function approach as described in Section IV in [1]. Finally, the concentration
For numerical evaluation and analysis of the proposed model a formulation in the discrete-time domain, i.e., in terms of a state-space description is preferred [1, Eqs. (65), (66)] \begin{align*} \bar{\mathbf{y}}^\mathrm{d}[k] &= \mathbf{\mathcal{A}}{\mathrm{c}}^\mathrm{d}(v_0) \bar{\mathbf{y}}^\mathrm{d}[k - 1] + \bar{\mathbf{f}}^\mathrm{d}\mathrm{e}[k] + \bar{\mathbf{y}}_\mathrm{init}\delta[k],\\[2pt] p^\mathrm{d}[\mathbf{x},k] &= \mathbf{c}_1^{\mathrm{\scriptsize T}}(\mathbf{x})\bar{\mathbf{y}}^\mathrm{d}[k]. \end{align*}
1.2 Parameters
The proposed model has been derived and is evaluated in terms of normalized physical quantities with respect to a reference length
| Parameter | Value | Normalized value |
|---|---|---|
| Radius | ||
| Length | ||
| Flow velocity | ||
| TX/RX distance | ||
| Diffusion coefficient | ||
| Reference length | ||
| Reference time |
Table 1: Physical parameters for numerical evaluation
1.3 Characterization into regimes
The proposed model is classified with respect to existing analytical models. Therefore, the dispersion factor
Table 2: Considered diffusion coefficients
1.4 Validation
For validation, the proposed model is compared to the results from particle based simulations (PBS) and the well-known models for flow-dominant and dispersive regime, see e.g. [3, Eqs. (11), (16)]. The parameters of the PBS are further described in [1, Sec. V-C].
2. Uniform release of particles
Supplementary to Fig. 3 in [1, Sec. V-D], we present videos of the particle concentration
We note that the value
The videos for a specific
| Eigenvalues | Release type | |
|---|---|---|
| varied | uniform |
3. Point release of particles
Supplementary to Fig. 5 in [1, Sec. V-E], we present videos of the particle concentration
We note that the values
The videos for a specific release position
| Eigenvalues | Release type | |
|---|---|---|
| point |
| Eigenvalues | Release type | |
|---|---|---|
| point |
| Eigenvalues | Release type | |
|---|---|---|
| point |
| Eigenvalues | Release type | |
|---|---|---|
| point |
| Eigenvalues | Release type | |
|---|---|---|
| point |
In addition to Fig. 5 in [1, Sec. V-E] we present the concentration at the RX over time for
| Eigenvalues | Release type | |
|---|---|---|
| point |
In addition to Fig. 5 in [1, Sec. V-E] we present the concentration at the RX over time for
4. Analysis of accuracy
Supplementary to [1, Sec. VI], we present videos of the particle concentration
4.1 Numerical reflections due to absorbing boundary
As described in [1, Sec. VI-B], the numerical evaluation of the proposed model leads to undesired effects due to the restriction of the cylinder in
| Eigenvalues | Release type | |
|---|---|---|
| uniform |
Instead of leaving the cylinder at
The occurring effect is well investigate in the modeling of wave-propagation in the free space and it can be avoided by the design of a perfectly matched layer. In future work, we want to overcome this effect by adopting the techniques presented in [4].
4.2 Undesired oscillations for small values of
As described in [1, Sec. VI-B], the numerical evaluation of the proposed model is limited in the flow dominant regime for very small values of
| Eigenvalues | Release type | |
|---|---|---|
| uniform |
In the video it can be seen, that the laminar shape of the flow profile is not captured perfectly. Furthermore, it is superimposed by undesired oscillations.
These oscillations originate from the well-known Gibb’s phenomenon which generally occurs when discontinuous and peaky functions are approximated by a finite series of continuous sine or cosine functions. Therefore, for the problem at hand, the phenomenon occurs for peaky particle releases that do not change their shape during transmission in the flow based regime. For larger values of
4.3 Dependence of accuracy on number of eigenvalues
Supplementary to Figs. 8a and b in [1, Sec. VI-B] we present videos of the particle concentration
The number of eigenvalues is [1, Eq. (67)]
4.3.1 Uniform release of particles
The following videos correspond to the scenario in Fig. 8a, i.e., a uniform release of particles for different values of
| Eigenvalues | Release type | |
|---|---|---|
| varied | uniform |
The videos for a specific number of eigenvalues
- The videos show, that the proposed model perfectly captures the influence of diffusion and flow on the propagation of the particles for
- For
- For
4.3.2 Point release of particles
The following videos correspond to the scenario in Fig. 8b, i.e., a point release of particles for different values of
| Eigenvalues | Release type | |
|---|---|---|
| varied | point |
The videos for a specific number of eigenvalues
- The videos show, that the proposed model perfectly captures the influence of diffusion and flow on the propagation of the particles for
- For
- For
5. Implementation
In the following we provide further details on the implementation of the proposed model in Matlab. The complete code can be downloaded via GitHub.
Symmetry of Bessel functions
As mentioned in [1, Secs. VI-A and V-E], the number of eigenvalues
Starting with the particle concentration
Decomposition
As mentioned in [1, Sec. VI-A] the block-diagonal structure of the state matrix
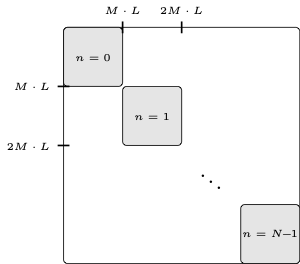
The block structuring in Fig. 2 depends strongly on how the eigenvalues
| 0 | 0 | 0 | 0 | |
| 1 | 0 | 0 | 1 | |
| 2 | 0 | 1 | 0 | |
| 3 | 0 | 1 | 1 | |
| 4 | 1 | 0 | 0 | |
| 5 | 1 | 0 | 1 | |
Table 3: Counting of eigenvalues for
Motivated by the block-structuring, the vectors and matrices in the state equation [1, Eq. (65)] can be rearranged as follows
$$
\begin{align*}
&\bar{\mathbf{y}}^\mathrm{d}[k] = \begin{bmatrix} \bar{\mathbf{y}}0^\mathrm{d}[k]\\ \vdots \\ \bar{\mathbf{y}}n^\mathrm{d}[k]\\ \vdots \\ \bar{\mathbf{y}}N^\mathrm{d}[k]\end{bmatrix},
&\bar{\mathbf{f}}\mathrm{e}^\mathrm{d}[k] = \begin{bmatrix} \bar{\mathbf{f}}{\mathrm{e},0}^\mathrm{d}[k]\\ \vdots \\ \bar{\mathbf{f}}{\mathrm{e},n}^\mathrm{d}[k]\\ \vdots \\ \bar{\mathbf{f}}{\mathrm{e},N}^\mathrm{d}[k]\end{bmatrix},
&&\bar{\mathbf{y}}\mathrm{init}^\mathrm{d} = \begin{bmatrix} \bar{\mathbf{y}}{\mathrm{init},0}^\mathrm{d}\\ \vdots \\ \bar{\mathbf{y}}{\mathrm{init},n}^\mathrm{d}\\ \vdots \\ \bar{\mathbf{y}}{\mathrm{init},N}^\mathrm{d}\end{bmatrix},
\end{align*}
Codeblock 1: Block-wise evaluation of the state equation.
Each block
The modified state equation can be evaluated more efficiently than the unmodified version [1, Eq. (65)] as the multiplication by a fully occupied matrix is replaced by the multiplication by a diagonal matrix. Therefore, it can be evaluated very efficiently by first-order filters (see Codeblock 2).
Codeblock 2: Efficient evaluation of the modified state equation in terms of first-order filters
6. Analysis of runtime and complexity
In the following we present a short analysis of the runtime and complexity of the Matlab implementation of the proposed model.
6.1 Complexity
As described in [1, Sec. VI-A], many calculations can be done in advance. Therefore, only the complexity of the numerical evaluation of the state equation in Codeblock 2 is presented.
The filter operation
which evaluates one line of the modified state equation performs one addition and one multiplication. The complexity depends on the temporal length of the input signal or rather on the observation time of the system. Denoting this time byTransforming the auxiliary system states
6.2 Runtime
The analysis of runtime strongly depends on the efficiency of the implementation, the programming language and the machine on that it is evaluated.
In the following, the runtime of the Matlab implementation of the proposed model is presented. Particularly, the runtime of the evaluation of the state equation in Codeblock 1 is shown in Table 3 for different values of
The numerical evaluation has been performed with the provided Matlab implementation on a Macbook-Pro with a
| state equation | |||
|---|---|---|---|
Table 4: Runtimes for different values of
7. References
[1] M. Schäfer, W. Wicke, L. Brand, R. Rabenstein and R. Schober, “Transfer Function Models for Diffusion and Laminar Flow in Cylindrical Systems”, submitted to IEEE Trans. Mol. Biol. Multi-Scale Commun., 2020, [online]: https://arxiv.org/abs/2007.01799
[2] V. Jamali, A. Ahmadzadeh, W. Wicke, A. Noel, and R. Schober, “Channel Modeling for Diffusive Molecular Communication—A Tutorial Review,” Proceedings of the IEEE, vol. 107, no. 7, pp. 1256–1301, 2019.
[3] W. Wicke, T. Schwering, A. Ahmadzadeh, V. Jamali, A. Noel, and R. Schober, “Modeling Duct Flow for Molecular Communication,” in Proc. IEEE Global Commun. Conf. (GLOBECOM), 2018, pp. 206–212.
[4] J. Grant and M. Wilkinson, “Advection–Diffusion Equation with Absorbing Boundary,” Journal of Statistical Physics, vol. 160, no. 3, pp. 622–635, 2015. [Online]. Available: https://doi.org/10.1007/s10955-015-1257-2